
Navigation menu
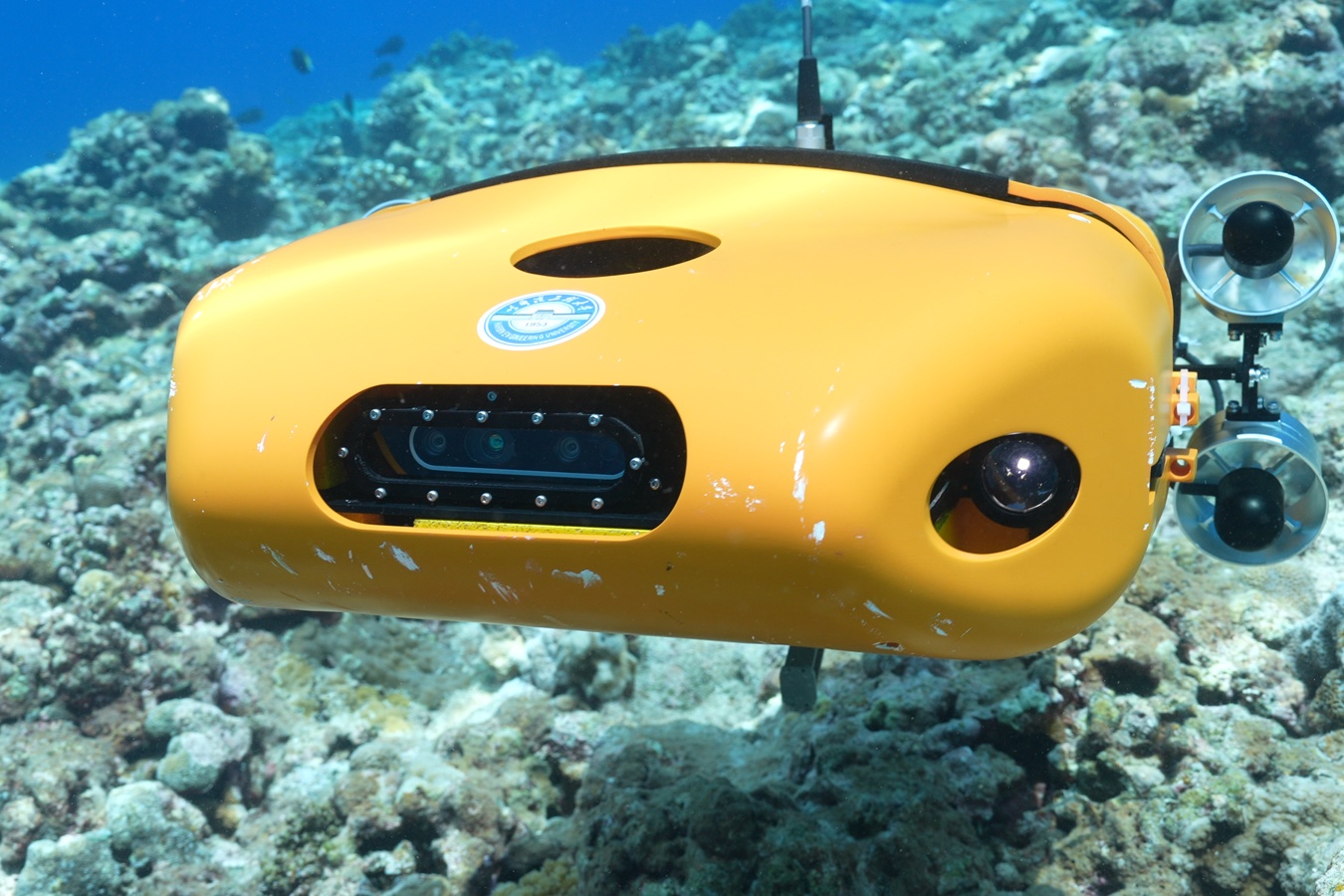 最近,在南中国海的早晨,直径约70厘米的水下机器人在一个优雅的拱门中潜水。这是敏捷潜艇机器人“ Turtle”的真正工作现场,该机器人由哈尔滨工程大学的运输和工程学院教授团队开发。他不仅在厘米水平上取得了进步,并在海边的环境观察中进行了环境观察,而且还破坏了传统潜艇机器人的刻板印象,其敏捷位置,例如“笨拙”和“硬”。我们已经开设了一个更精确,高效和生态检测的新时代。 “海龟推进方法发现,倾斜和击倒先前的四肢不仅减少了水的损害,而且还可以保持有效的推进。”团队成员刘·卡辛(Liu Kaixin)回忆说,在无数的缺点之后,团队得出了档案型机器人导航,螺旋桨设计与露天的数学方程式机器人的NCE参数,显着改善了降级机器人参数与外观参数的设计之间的数学方程。与研发效率相比,“乌龟”机器人在导航期间使用精确定位的推进剂具有很少的波浪。沉积物的干扰减少了90%,以确保机器人了解即时感知并防止底部导航底部。该团队提出了一种“三个点惯性测量的侦察方法”,以将机器人数据的噪声降低约76.2%,从而减少了响应时间1.1倍。倾斜度控制的稳定性增加了7.16倍。经过持续的研究和开发,该团队将一种态度限制算法引入了算法,以远程关注。机器人的敏捷性显着提高了机器人的敏捷性。灵活的“乌龟”机器人运动已成功打破了完整的技术瓶颈在水下地形中海底车辆的E域操作。它们不仅可以用来观察珊瑚,而且还可以在水下捕鱼,搜救和救援中发挥重要作用。
最近,在南中国海的早晨,直径约70厘米的水下机器人在一个优雅的拱门中潜水。这是敏捷潜艇机器人“ Turtle”的真正工作现场,该机器人由哈尔滨工程大学的运输和工程学院教授团队开发。他不仅在厘米水平上取得了进步,并在海边的环境观察中进行了环境观察,而且还破坏了传统潜艇机器人的刻板印象,其敏捷位置,例如“笨拙”和“硬”。我们已经开设了一个更精确,高效和生态检测的新时代。 “海龟推进方法发现,倾斜和击倒先前的四肢不仅减少了水的损害,而且还可以保持有效的推进。”团队成员刘·卡辛(Liu Kaixin)回忆说,在无数的缺点之后,团队得出了档案型机器人导航,螺旋桨设计与露天的数学方程式机器人的NCE参数,显着改善了降级机器人参数与外观参数的设计之间的数学方程。与研发效率相比,“乌龟”机器人在导航期间使用精确定位的推进剂具有很少的波浪。沉积物的干扰减少了90%,以确保机器人了解即时感知并防止底部导航底部。该团队提出了一种“三个点惯性测量的侦察方法”,以将机器人数据的噪声降低约76.2%,从而减少了响应时间1.1倍。倾斜度控制的稳定性增加了7.16倍。经过持续的研究和开发,该团队将一种态度限制算法引入了算法,以远程关注。机器人的敏捷性显着提高了机器人的敏捷性。灵活的“乌龟”机器人运动已成功打破了完整的技术瓶颈在水下地形中海底车辆的E域操作。它们不仅可以用来观察珊瑚,而且还可以在水下捕鱼,搜救和救援中发挥重要作用。